
在2026年的高雄智慧宅推案中,梯控聯動已正式從實驗性功能轉向標準化規格。垂直運輸系統與移動載體的技術對標,核心在於解決跨層級移動的斷點。這不僅涉及通訊協定的轉換,更包含物理空間的精確對準與多機調度的優先權分配,直接影響了未來建築的勞務自動化效率。
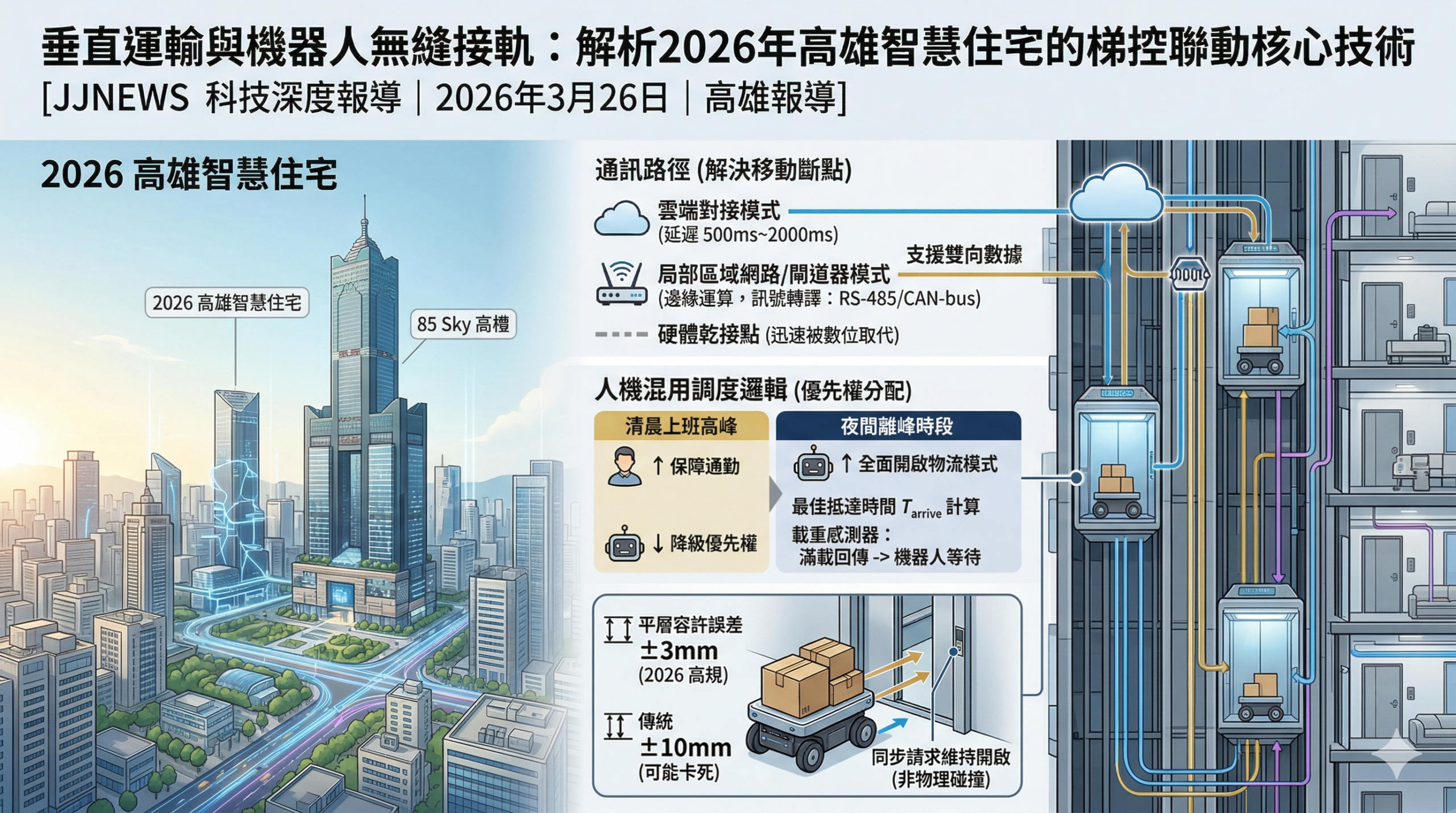
系統架構的穩定性是物流效率的基石,目前主要透過三種通訊路徑實現。雲端對接模式雖然建置成本低且適用於跨品牌整合,但其延遲時間受網路環境波動影響,平均延遲約在 500ms 至 2000ms 之間,這常導致機器人錯過電梯的開門週期。為了解決此問題,許多建案開始導入局部區域網路或閘道器模式,在建築物內設置專用閘道器,將電梯的 RS-485 或 CAN-bus 訊號轉譯為機器人可識別的協定。這種模式具備較高的邊緣運算能力,能確保在外部網路斷線時,垂直運輸機能不致失效。而最傳統的硬體乾接點聯動,因無法回傳電梯樓層與載重等關鍵數據,正迅速被支援雙向數據回饋的數位協定取代。
當電梯系統從單純載人轉向人機混用,內部的調度邏輯必須進行全面重構。動態優先權分配讓系統能根據需求進行精確計算,例如在清晨上班高峰期,機器人的配送任務會被賦予降級優先權,以保障住戶的通勤效率,而在夜間離峰時段則全面開啟物流模式。調度系統會計算最佳抵達時間,若電梯內的載重感測器回傳已滿載訊號,系統會即時向機器人發送等待指令,避免機器人堵塞在電梯廳口而影響住戶動線。
物理界面的銜接則面臨極高精度的考驗。傳統電梯的平層容許誤差約為正負 10mm,但對於輪徑較小、底盤較低的服務型機器人,這樣的落差可能導致載體傾倒或卡死。因此,2026 年的高規智慧宅要求電梯平層誤差必須嚴格控制在正負 3mm 以內。此外,移動載體必須具備與電梯門感測器同步的能力,透過訊號直接請求維持開啟狀態,而非僅依賴物理碰撞感應,這對於保障昂貴的機器人設備與機電系統壽命至關重要。
分析師指出,垂直運輸的數位化程度實質上決定了建築物的勞務自動化上限。如果電梯系統無法與移動載體進行低延遲的數據交換,機器人將只會成為公設空間的障礙物而非高效的服務工具。在 2026 年的競爭環境下,能夠實現軟硬體深度對標的建商,不只是在賣房子,而是為建築物建立了一套具備擴充性的運作系統,這將直接反映在長期的物業管理效率與資產價值上。
發佈留言